Zur Versorgung der Technik im Kran habe ich den folgenden Schaltplan entwickelt: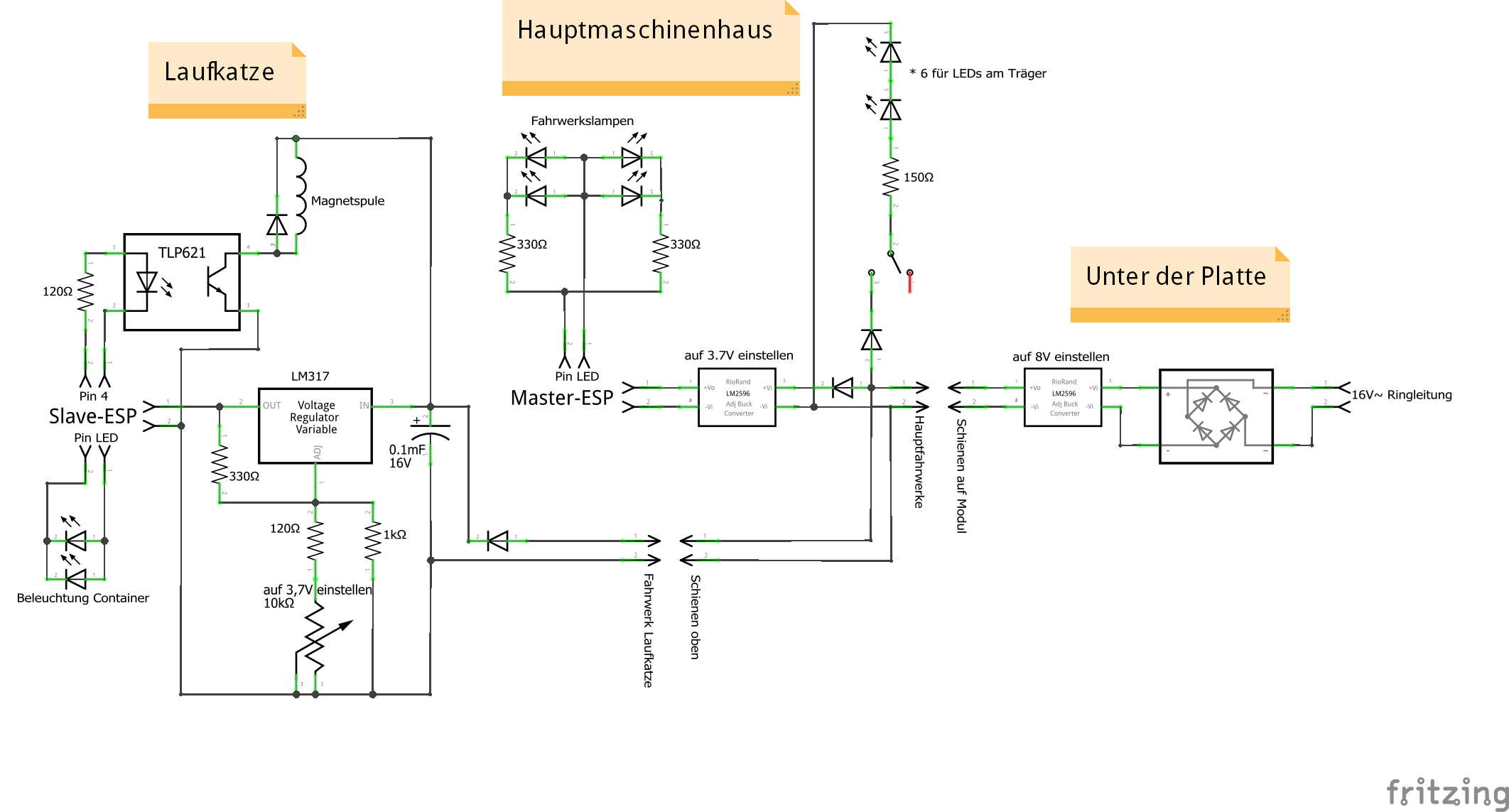 Die Technik teilt sich in drei Bereiche auf:
Die Technik teilt sich in drei Bereiche auf:
- Unter der Platte ist ein Spannungswandler von 16V~ (Ringleitung) auf ca. 8V=. Da die ESP32 Platinen nur mit 3,7V versorgt werden dürfen, wollte ich bei den Spannungs-wandlern im Kran nicht zu viel Verlustwärme entstehen lassen.
- Das Hauptmaschinenhaus enthält die Master-Steuerung (WLAN-Access-Point), die Ansteuerung der beiden Hauptfahrwerksmotoren und die LEDs an den Fahrwerken. Zudem gibt es hier noch einen Schalter, der die Beleuchtung einschalten kann. Das konnte ich nicht ferngesteuert machen, da kein Ausgang mehr zur Verfügung stand.
- In der Laufkatze wird der Seilzug gesteuert, die beiden LEDs unterhalb der Laufkatze ferngesteuert aktiviert und der Hubmagnet geschaltet. Auch wenn der Spannungs-regler hier größer wirkt als die anderen: es kann so kleiner aufgebaut werden.
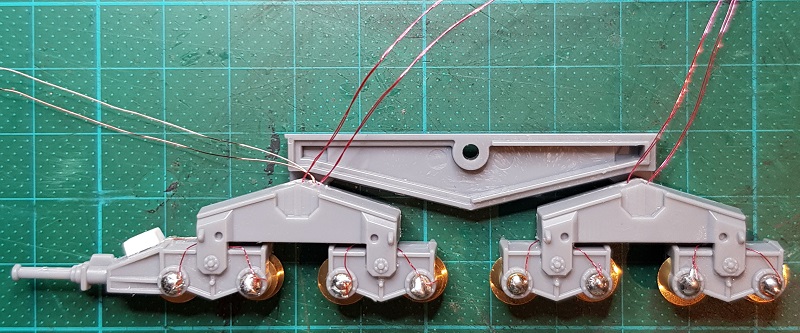 Hier kann man sehen, wie ich die Kupferlackdrähte der Räder vom Hauptfahrwerk (gibt es viermal) in die Halterungen eingebaut habe.
Hier kann man sehen, wie ich die Kupferlackdrähte der Räder vom Hauptfahrwerk (gibt es viermal) in die Halterungen eingebaut habe.
In geschlossenem Zustand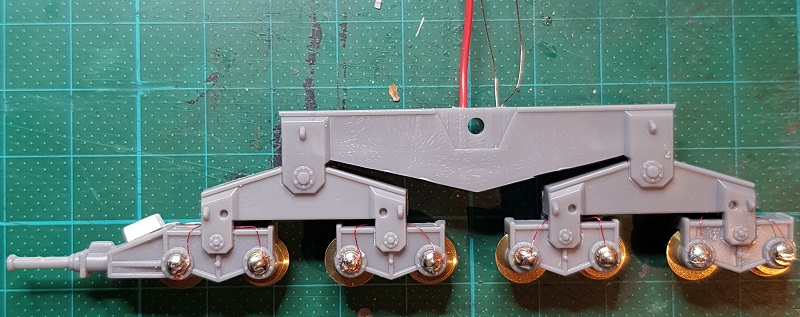 kommt dann nur noch ein Stromkabel (hier rot) und zwei Kupferlackdrähte (für die LED in dem weißen Kästchen) heraus, die dann zum Maschinenhaus geführt werden müssen.
kommt dann nur noch ein Stromkabel (hier rot) und zwei Kupferlackdrähte (für die LED in dem weißen Kästchen) heraus, die dann zum Maschinenhaus geführt werden müssen.
Nach längerer Zeit mache ich mal weiter. Mittlerweile habe ich die Teile schon eingefärbt (Airbrush). Hier sieht man auch, wie die Verkabelung innerhalb des Kranaufbaus ist.
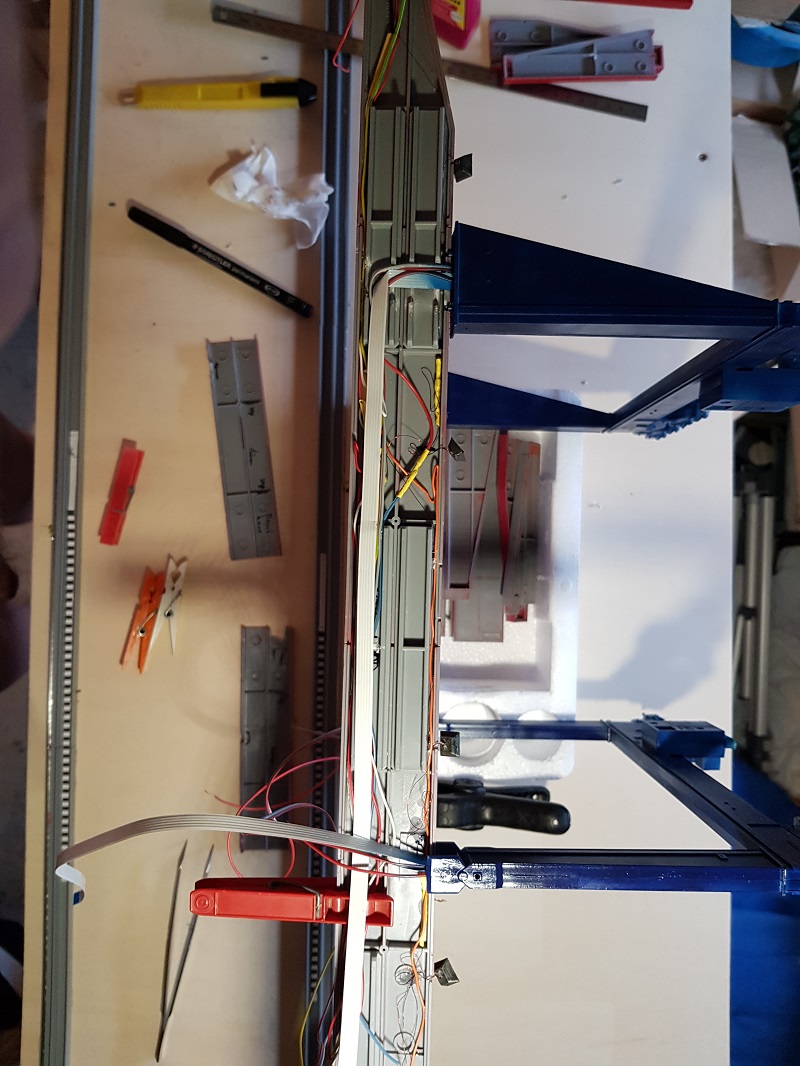 Die Flachkabel sind von den Motoren (die blauen Kästen rechts im Bild). Ich habe auch – entgegen der Anleitung – alle Kabel innen verlegt. Am linken Bildrand erkennt man die Führungsschiene des Hauptfahrwerks.
Die Flachkabel sind von den Motoren (die blauen Kästen rechts im Bild). Ich habe auch – entgegen der Anleitung – alle Kabel innen verlegt. Am linken Bildrand erkennt man die Führungsschiene des Hauptfahrwerks.